
|
We've been running since we were young children. Parents are constantly scrambling after their running toddlers. Running is something bipedal human beings do. It is a natural activity. So, why is it that as I see so many with terrible running mechanics? At some point during our development, some of us forget how to run. Just like any skill, if you don't use it, you loose it. This is not a position paper on why we loose the skill of running. Instead, I'd like to exam what constitutes good running form... Even though exercise physiologists and kinesiologists (and track coaches) have been analyzing running mechanics for years, the topic of seems to have gained popularity with the masses with the publication of Born to Run and the barefoot running fad. While I have not read the Born to run, nor do I advocate of barefoot running, five finger, or minimalist shoes, I am interested in running mechanics. Most of my research in this comes from the USATF educational materials and various articles. Most recently, I've been influenced by Vern Gambetta's PAL System, the ideas of Pose running interpreted by Brian MacKenzie, and this article and this article. These writings and methodologies have commonalities and differences. PAL, Pose, and even bare footer proponents should be able to agree on these three constants; (1) running involved the body going through a sequences of movements, (2) gravity is always acting on the body, and (3) the force applied to the ground, called ground reaction force (GRF), propels the body forward. From jogging to maximum velocity sprints, these three constants apply. We should also agree that to improve running mechanics it is necessary to (1) optimize GRF and (2) be as efficient as possible. The GRF is measured where the foot meets the ground. There are numerous factors that influence GRF; athletes weight, running speed, surface area of contact point, etc. Good running mechanics must also be efficient. This means that it should take less energy for the same amount of effort. Getting the body to perform the correct movement sequence with the force of gravity and the impact of ground contact while Optimizing GRF and efficiency is the holy grail of running mechanics. Improved running mechanics will improve speed and injury. We seem to be born with this ability, so how can we get it back? Some of the details of running mechanics are different depending on running speeds. The PAL system focuses on sport performance and relatively fast running speeds, even maximum velocity sprints. The Pose proponents seem to be focus on relatively slower running speeds that do not involve maximal speeds. 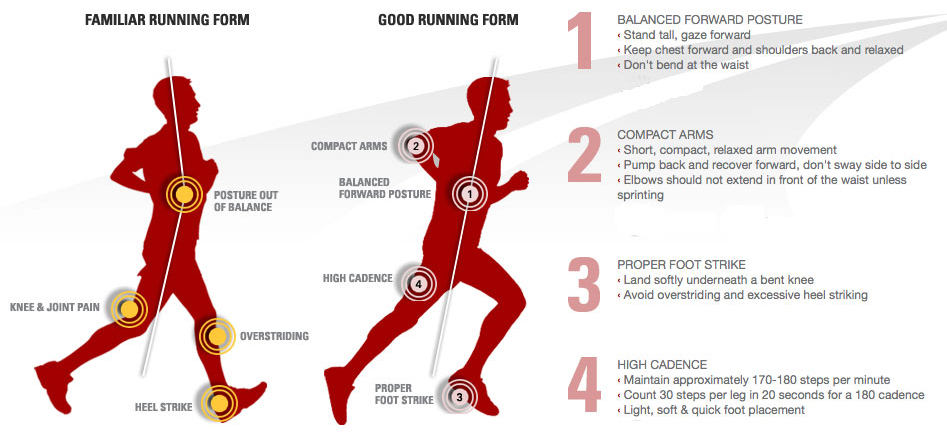
Figure 1: POSE running characteristics
The three characteristics behind Pose running are position, fall, pull. The Pose method is constructed around the idea that running is a controlled fall with a "change of support." As a result, the runners center of mass (COM), or balance, should be forward. Chest forward and shoulders shoulders back, but in front of the hips, achieves this balance. The arms move linearly, forward and backward. They are compact and do not cross the center line of the body. Foot strike, the point of GRF, is underneath a bent knee and very close to the COM. Cadence, that is the number of contacts per unit of time, is relatively high to achieve light and quick foot placement. Pulling the foot off the ground is also a characteristic of Pose running. After the COM has passed over the foot, the pull is initiated with the hamstring until the ankle is pulled under the hip. The height and intensity of the pull is dependent on running speed. 
Figure 2: PAL system
The PAL system is constructed around sound sprinting mechanics and applying these mechanics to longer distances (slower speeds). PAL is an acronym that stands for Posture, Arm action, and Leg action.
"Running tall" cues proper posture whose reference points are head, trunk, hip, knees, ankle, and foot. Running posture influences arm action and leg action and must be a priority. The key reference points for good posture are the trunk and hips as they have the largest mass and, in order to move forward, the trunk and hips rotate. Good running mechanics must minimize, not eliminate, this rotation. Arm action assists balance and rhythm. The primary motion of the arms is forward and backward, but some rotation is necessary to counteract the rotation of the trunk and hips. The amplitude of the arm action is directly proportional to running speed. The faster running speeds require greater arm amplitude. The most efficient leg action, and stride, has the foot landing as close under the COM as possible. The stretch-shortening cycle (SSC) is the main contributor to the amplitude of the leg action, which is reflected in the knee lift and stride length. In this model, speed is stride length times stride frequency.
7 Comments
3/21/2022 05:38:17 am
I very much appreciate it. Thank you for this excellent article. Keep posting! 12/20/2022 09:23:42 pm
İnstagram takipçi satın almak istiyorsan tıkla. 1/8/2023 01:59:18 am
100 tl deneme bonusu veren siteleri öğrenmek istiyorsan tıkla. 6/30/2023 10:00:45 am
En iyi bayburt ilan sitesi burada. https://bayburt.escorthun.com/ Leave a Reply. |
AuthorFormer mathematics teacher and track & field coach at Phillips Academy in Andover, MA. Categories
All
Archives
April 2017
|
 RSS Feed
RSS Feed
Photos from Arya Ziai, HIRAOKA,Yasunobu, photosteve101, HIRAOKA,Yasunobu
